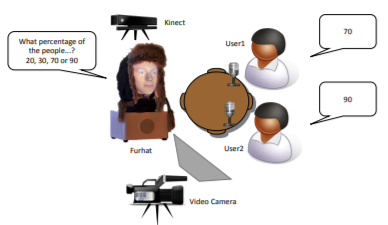
We explore the effect of laughter perception and response in terms of engagement in human-robot interaction. We designed two distinct experiments in which the robot has two modes: laughter responsive and laughter non-responsive. In responsive mode, the robot detects laughter using a multimodal real-time laughter detection module and invokes laughter as a backchannel to users accordingly. In non-responsive mode, robot has no utilization of detection, thus provides no feedback. In the experimental design, we use a straightforward question-answer based interaction scenario using a back-projected robot head. We evaluate the interactions with objective and subjective measurements of engagement and user experience.
Key words: laughter detection, human-computer interaction, laughter responsive, engagement.
Authors: Bekir Berker Turker, Zana Bucinca, Engin Erzin, Yücel Yemez, Metin Sezgin